
News
News
Recently, Professor Guo Weizhong’s team from the Institute of Design and Control Engineering for Heavy Equipment, School of Mechanical Engineering, Shanghai Jiao Tong University, has made a series of breakthroughs in the field of biomimetic joint design. The research team systematically proposed an innovative biomimetic joint design method based on the complex motion patterns of human joints, incorporating principles of mechanism theory and ensuring high human-machine compatibility. The team developed a comprehensive research system that spans from the proposed bionic concept, joint mechanism synthesis methods, to performance analysis. Using the complex motion pattern of the human knee joint as a biological template, the team established a biomimetic modeling framework, proposed a synthesis method for biomimetic joint mechanisms, and developed a new type of one degree of freedom (DoF) varying instantaneous center of rotation (VICR) joint with complex motion capability. The research results were published in the authoritative international journal Mechanism and Machine Theory (MMT), under the titles “Bionic concept and synthesis methods of the biomimetic robot joint mechanism for accurately reproducing the motion pattern of the human knee joint” and “Unlocking complex motion in one DoF higher pairs: Concept, constraint, and form closure for varying instantaneous center of rotation (VICR) joints”. Doctoral student Zhu Gaohan is the first author, and Professor Guo Weizhong is the corresponding author.
In both human motion systems and mechanical motion systems, joints serve as core components that transmit and constrain motion as well as forces. Their characteristics directly determine the overall motion pattern and performance. However, human biological joints and mechanical joints differ significantly in terms of geometry, motion patterns, actuation methods, etc. In human-machine interaction systems such as exoskeletons, prosthetics, and orthoses, overly simplifying human joint motion can lead to misalignment between human and machine movements, potentially causing injury to users. Therefore, establishing a design method for biomimetic joints that can accurately reproduce human joint motion patterns is of great significance for advancing the high-quality development of wearable and rehabilitation devices.
The knee joint is one of the largest and most complex joints in the human body, primarily completing flexion and extension in the sagittal plane. During its movement, the instantaneous center of rotation (ICR) of the femur relative to the tibia continuously changes, resulting in a typical varying ICR motion pattern. However, accurately reproducing this complex motion in mechanical joints still faces technical challenges, and there is a lack of a systematic and effective design methodology.

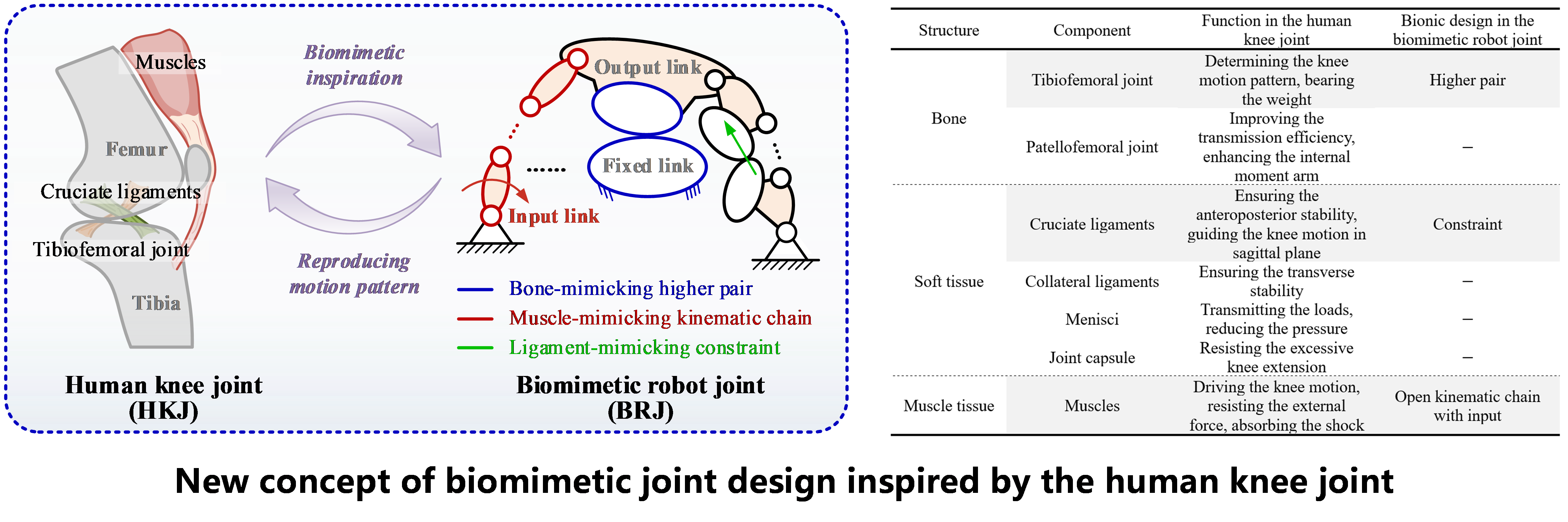
To address this, the research team utilized mechanism theory to deeply analyze the motion mechanism of the human knee joint’s physiological structure. The team extracted core mechanical components from three aspects: the rolling-sliding contact between the bones, the constraint function of the cruciate ligaments, and the driving role of the attached muscles, thereby revealing the mechanical principles behind the knee joint’s varying ICR motion. Based on this, the team proposed a new biomimetic joint design concept inspired by the human knee joint: modeling the tibiofemoral joint as a conjugate contact higher pair, equating the cruciate ligaments to the constraints required for maintaining one DoF motion, and modeling the attached muscles as a motion chain with input. This concept creates a mapping paradigm from the “bone + ligament + muscle” in the human knee joint to the “conjugate higher pair + constraint + active motion chain” in the biomimetic joint, which forms a new biomimetic modeling framework and provides a theoretical foundation for designing biomimetic joints enabling complex motion.
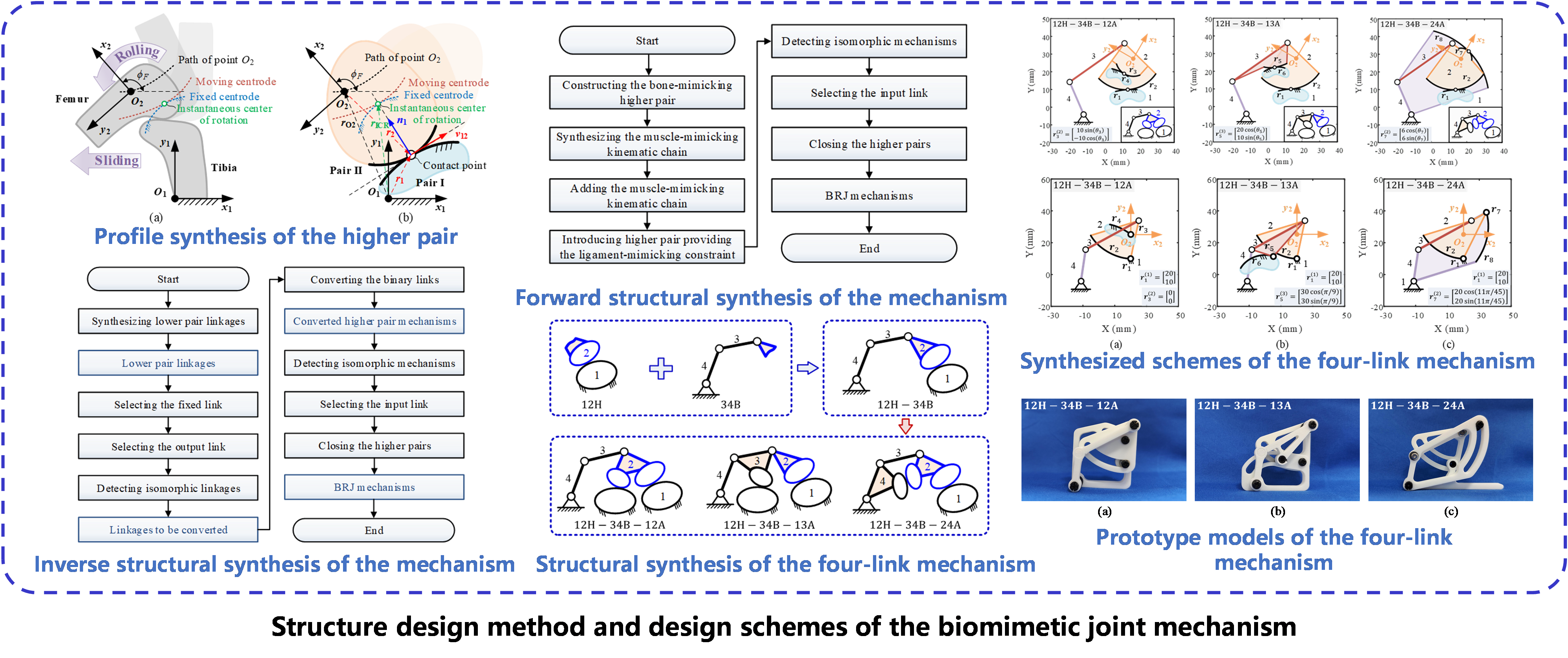
Building on this, the team further explored the mechanism realization and synthesis methods for biomimetic joints. For the conjugate higher pair in the biomimetic joint, the team proposed a profile synthesis method that enables the geometric design of elemental profiles of joints for the target motion. For the topological structure of the biomimetic joint mechanism, the team developed a task-oriented structural synthesis method of higher pair mechanisms. These provide theoretical tools for the innovative design of biomimetic joint mechanisms with high biomimetic fidelity and accurate motion generation capabilities. Based on the proposed concepts and methods, the team discovered and constructed three novel four-link biomimetic joint mechanisms, validating their structural feasibility and functional effectiveness through theoretical modeling as well as physical testing.
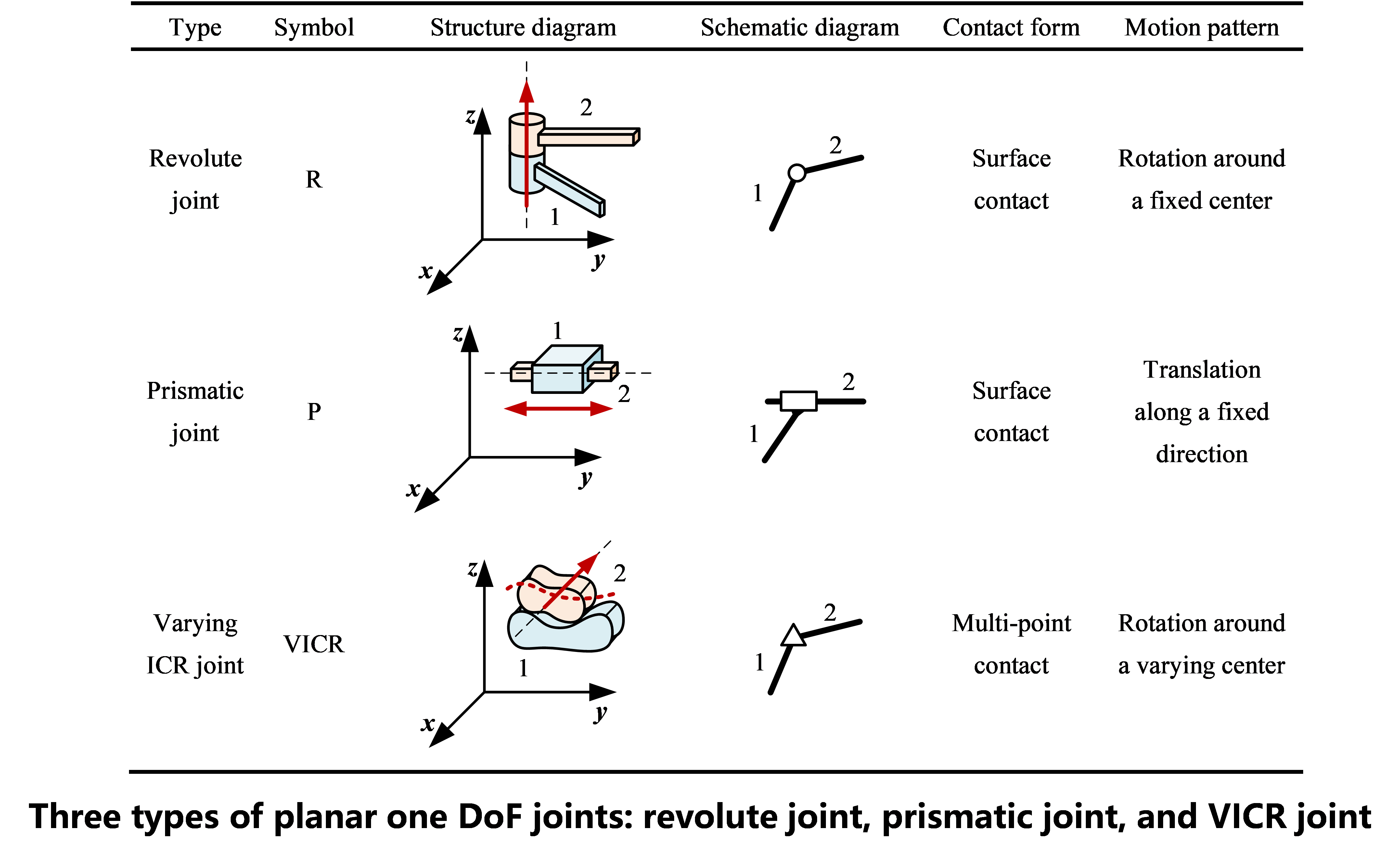
Based on the established biomimetic joint design method, the team proposed a new concept for the VICR joint. This novel joint is designed with the core concept of “multiple contact points + one DoF motion”. Through the geometric design of the elemental profiles, the VICR joint achieves complex motion with a varying ICR while maintaining only one DoF, offering both structural compactness and motion flexibility. Compared to traditional one DoF joints such as revolute and prismatic joints, the VICR joint is capable of accurately reproducing the complex motion patterns of human joints, effectively overcoming the challenges for achieving the complex motion in one DoF joints.
In terms of performance analysis, the team introduced the generalized pressure angle index based on screw theory, systematically evaluating the constraint capabilities of the VICR joints under different contact point conditions. Additionally, the team proposed a geometric representation method for constraint performance, transforming the complex motion-force constraint relationships of the VICR joints into the geometric relationships between the normal vectors of contact profiles. This approach provides intuitive and visual theoretical tools for the design and optimization of elemental profiles.
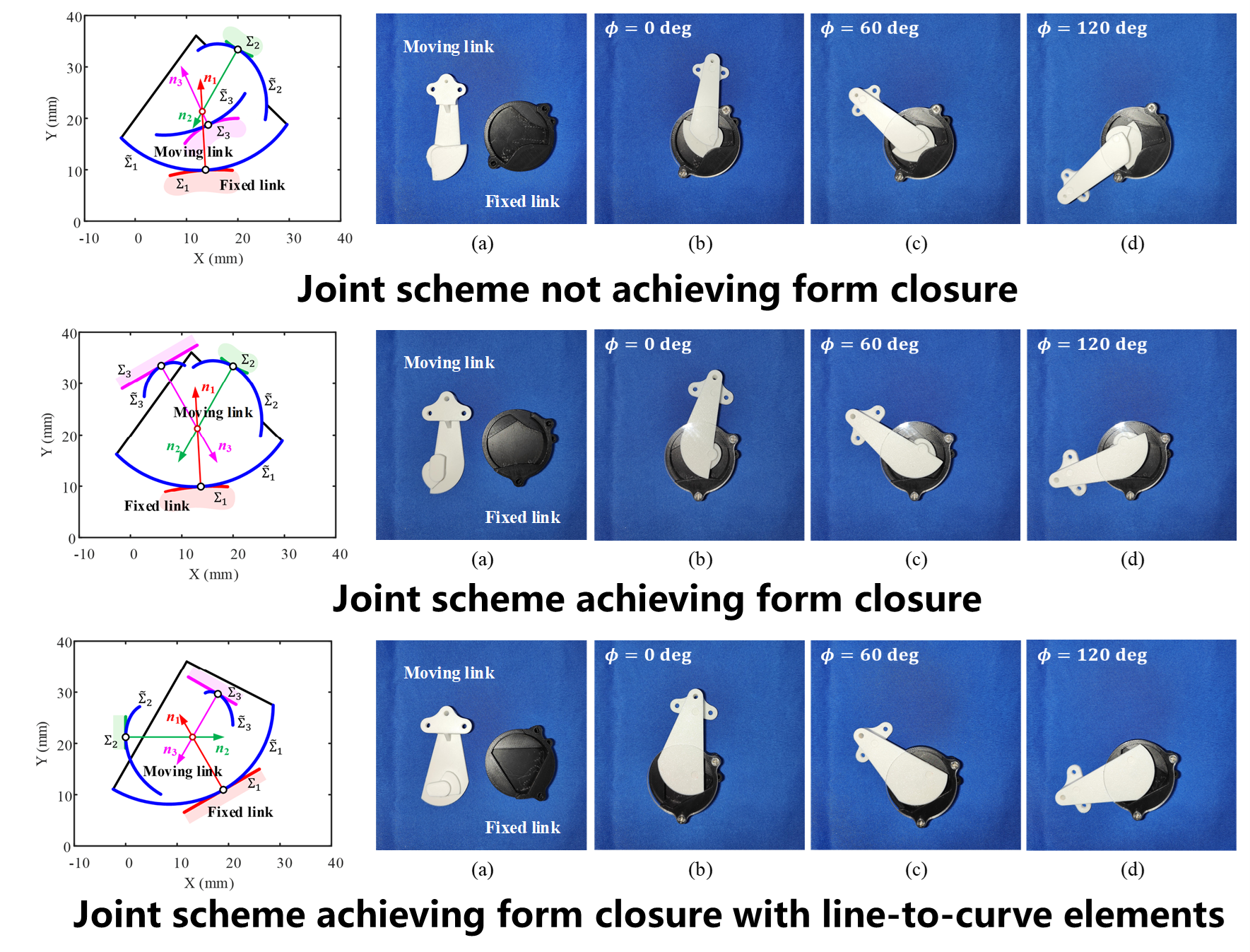
Aiming to address the inherent contact disengagement problem in higher pairs, the team conducted an in-depth study of the form closure principles of VICR joints, proposing three equivalent form closure criteria and demonstrated that “at least three simultaneous contact points are required to achieve form closure for VICR joints with two-dimensional plane motion”. Based on this, the team developed a visual analysis method for joint closure space, providing a systematic basis for predicting and ensuring joint closure at the design stage.
The research team carried out application verification of the theory, using the reproduction of the human knee joint’s sagittal plane motion as an example. The research systematically demonstrated the complete process of elemental profile design, constraint performance evaluation, and form closure ability determination for three typical VICR joints, and verified the feasibility as well as effectiveness of the proposed methods through experiments.
Through systematic research, the team has developed a comprehensive methodology that includes the novel bionic design concept, synthesis methods, and performance evaluation, providing a new paradigm for designing biomimetic joints that can accurately reproduce complex human joint motions. On this foundation, the team has proposed a novel one DoF VICR joint, enriching the types of planar joints as well as providing theoretical methods and tools for biomimetic joint design in human-machine interaction devices such as exoskeletons and prosthetics.
Professor Guo Weizhong’s team is dedicated to solving cutting-edge fundamental scientific problems and key technologies in the fields of modern mechanism theory and parallel robotics, aiming to drive innovation in equipment for major engineering applications, such as robotics and aerospace, through breakthroughs in basic theory. In recent years, the team has published over 30 research papers in journals including Mechanism and Machine Theory, ASME Transactions-Journal of Mechanisms and Robotics, ASME Transactions-Journal of Mechanical Design, and IEEE Transactions on Robotics.
Paper links:
https://doi.org/10.1016/j.mechmachtheory.2024.105832
https://doi.org/10.1016/j.mechmachtheory.2025.106154

Shanghai Jiao Tong University
Address: 800 Dongchuan Road, Shanghai
200240